
All projects, prototypes and experiments
Projects and Papers
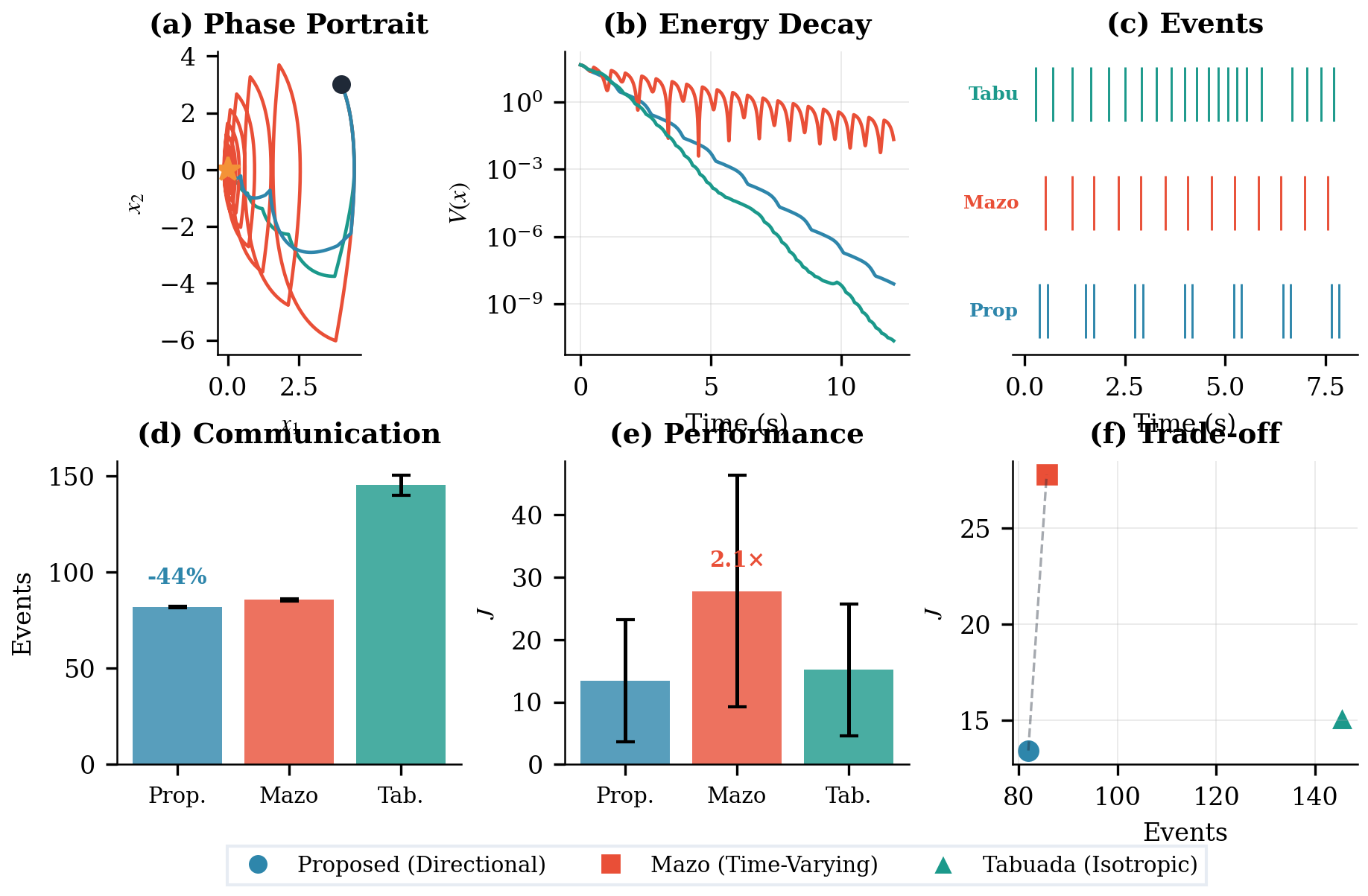
When Silence Carries Information: Physics-Based Compression at the OT Edge (2025) Physics-based event-triggered control for efficient communication in OT edge systems.
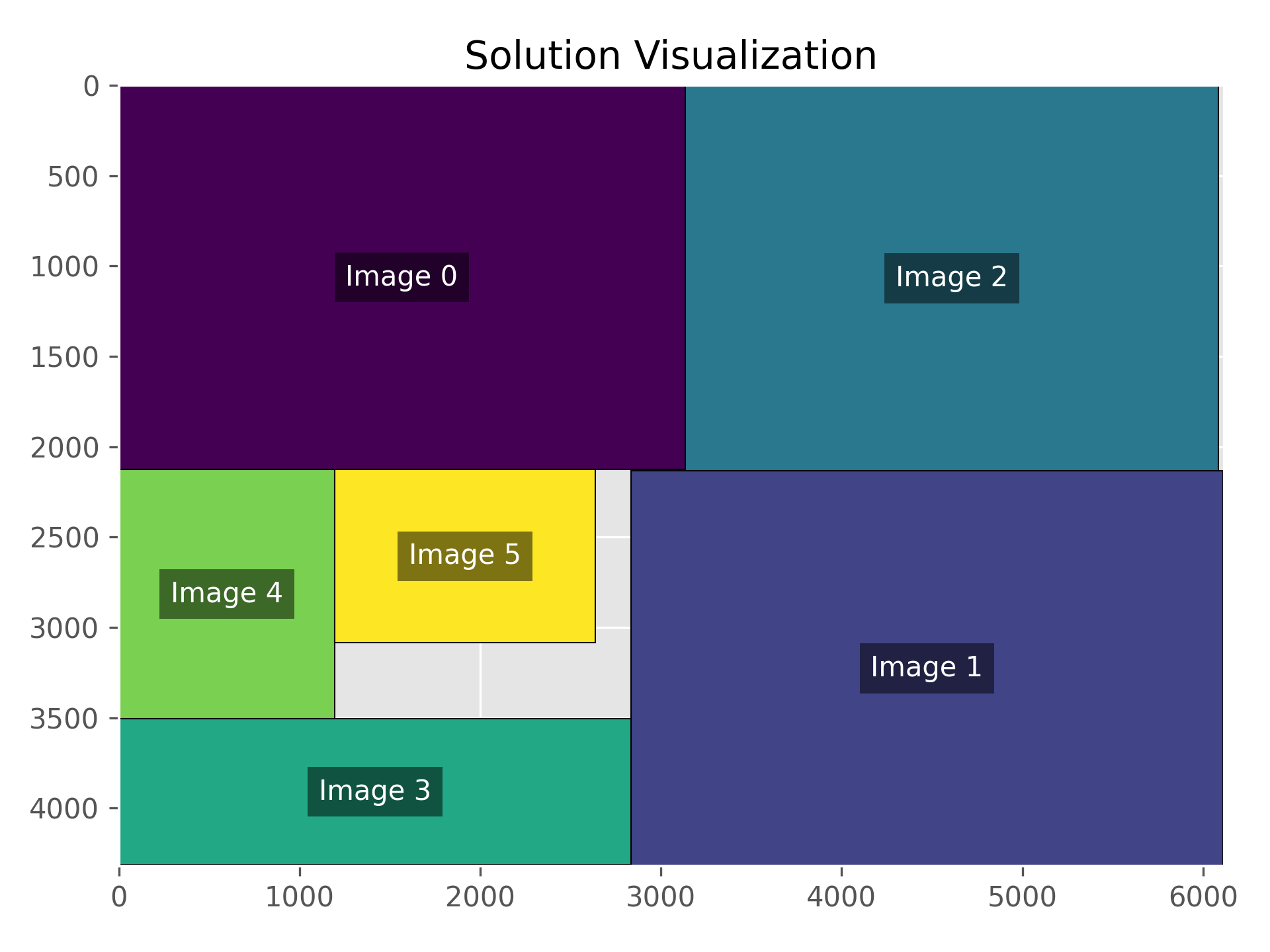
An Optimal Image Packing Algorithm (2023) Optimally arranging and scaling 2D images on a canvas using constraint programming using OR-tools. The implementation is done in Python, Go, C++, Java, and C#.
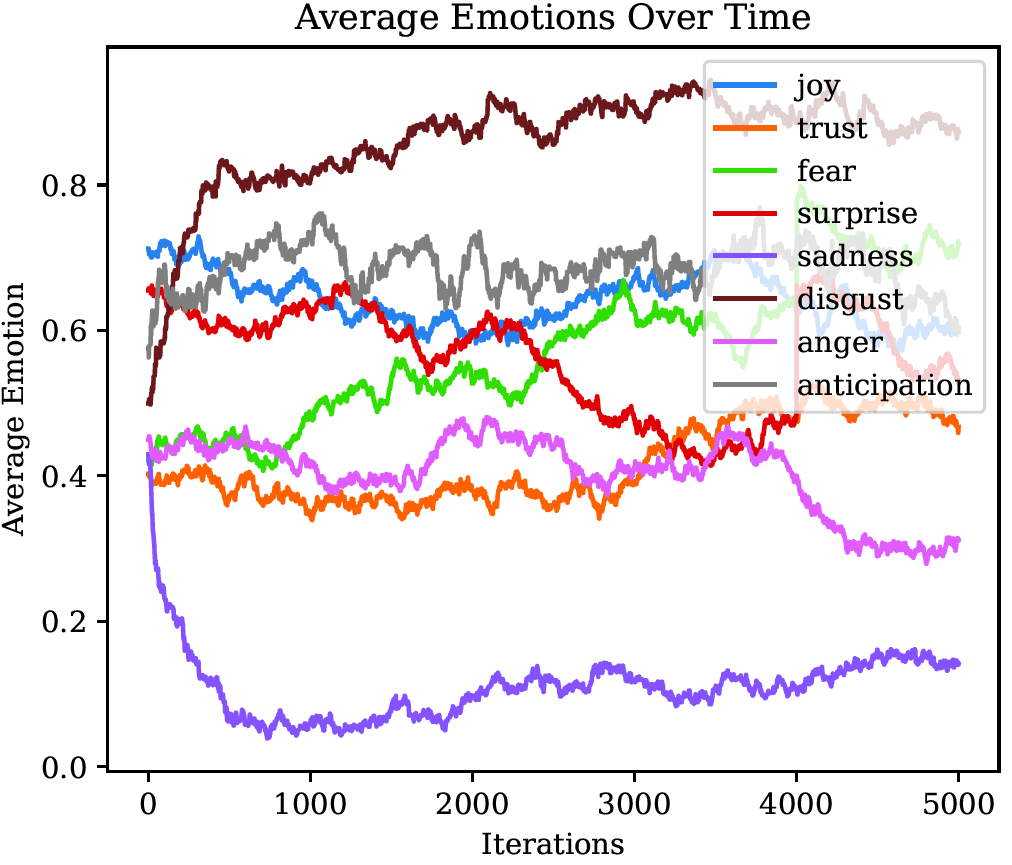
Trust from Ethical Point of View (2023) exploring dynamics through multiagent-driven modeling for simulating the dynamics of ethical trust within a population of agents incorporating time-variant dynamic attributes, such as rationality, trustworthiness, reliability, and reputation.
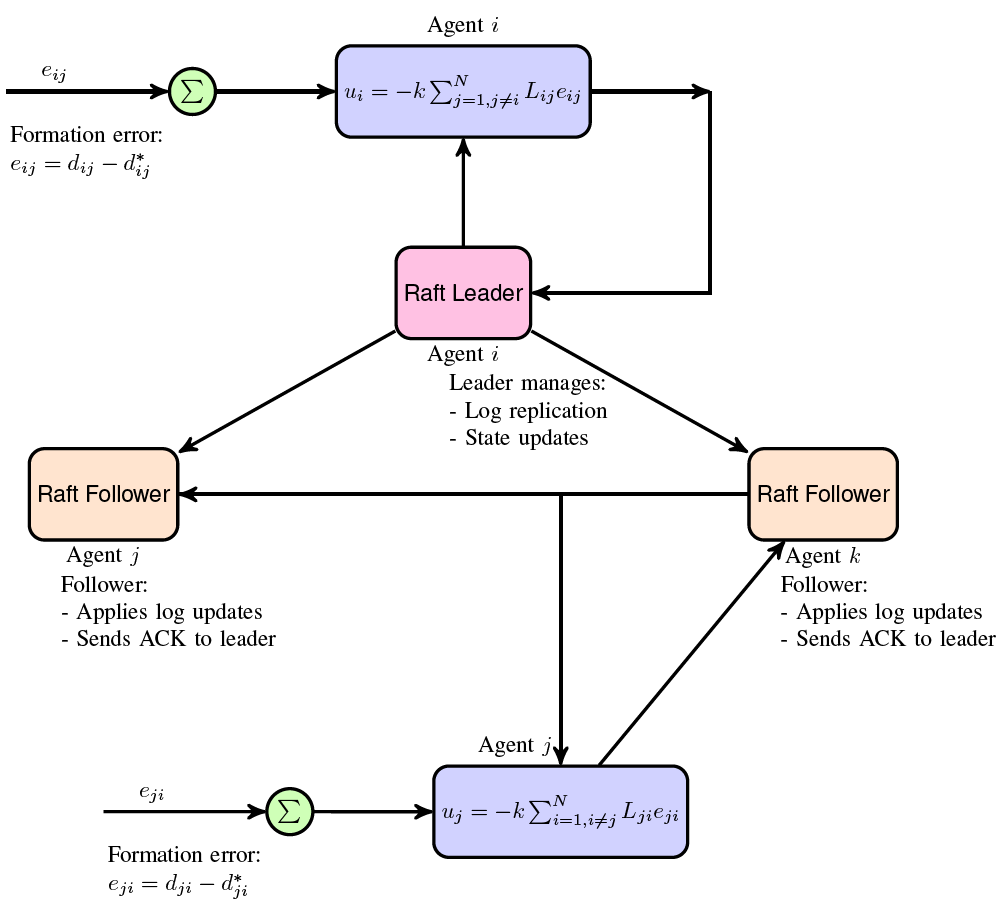
Rafting Towards Consensus (2023) for formation control of distributed dynamical systems. It is an adaptation of the Raft consensus algorithm for achieving emergent formation control in multi-agent systems with a single integrator dynamics.
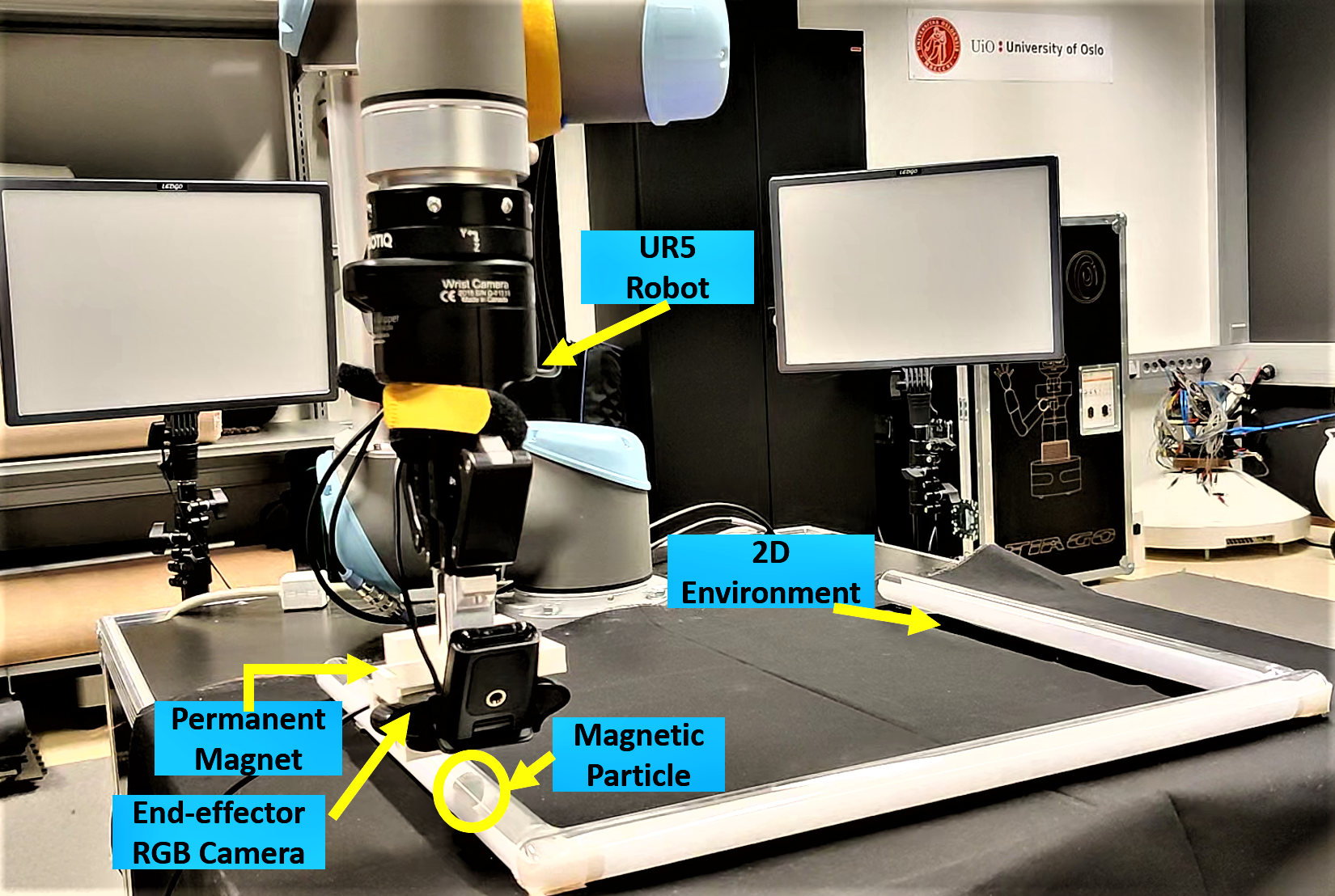
Reinforcement Learning-Based Switching Controller (2023) for a milliscale robot in a constrained environment to autonomously move a ferromagnetic object representing a milliscale robot, around obstacles within a constrained environment in the presence of disturbances.
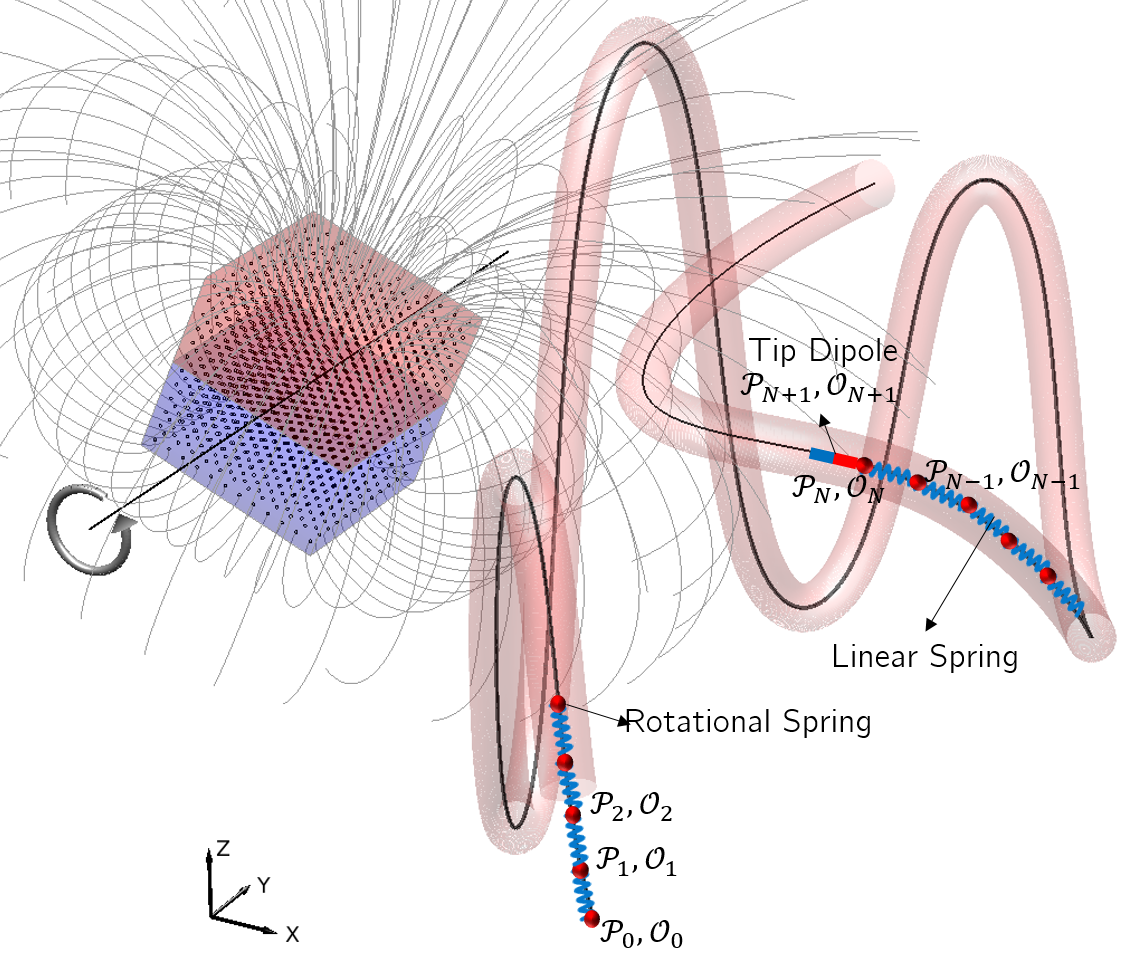
Physics-Based Simulation and Control Framework (2022) for Steering a Magnetically-Actuated Guidewire
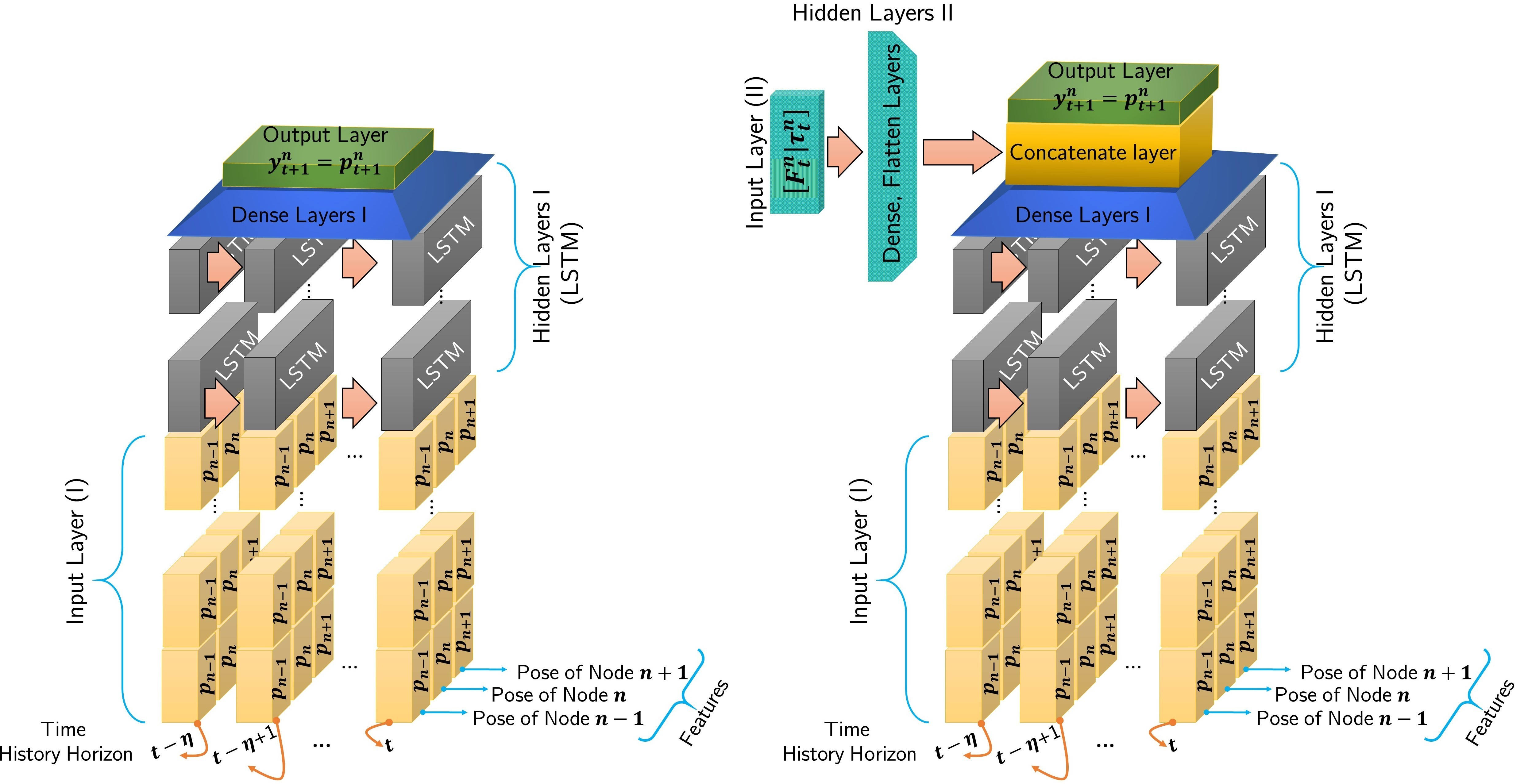
Recurrent Neural-Network-Based Real-Time Dynamic Model (2022) for Soft Continuum Manipulators
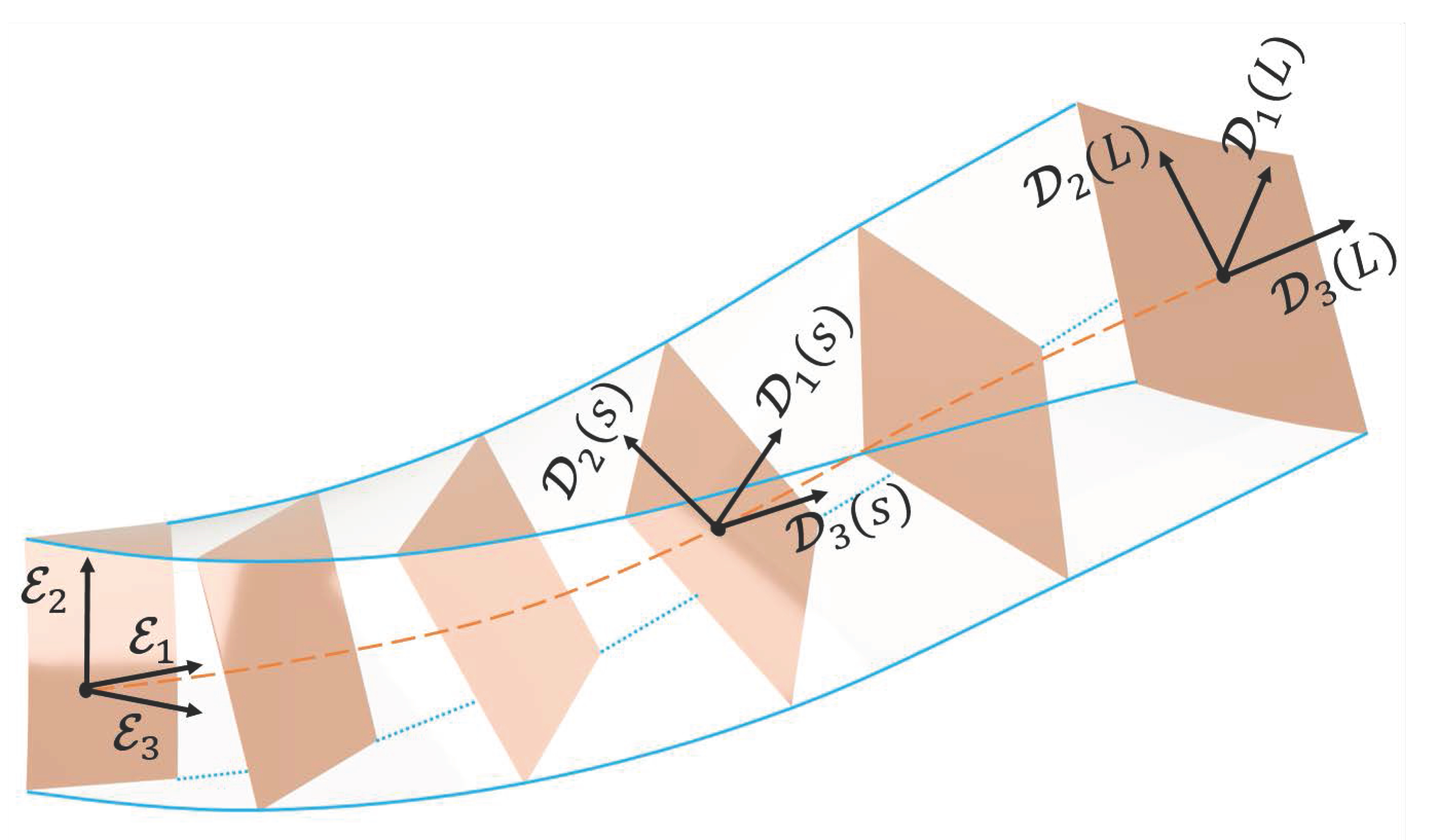
Dynamic Modeling of Soft Continuum Manipulators (2020) using Lie Group Variational Integration
Finite-Time Input to State Stability (2020) of Discontinuous Dynamical Systems, A Case Study of Networked Euler-Lagrange Systems
Multi-User Tele-rehabilitation Robots (2019) Actuator Fault and Link Failure Accommodation for Disturbed Multi-User Telerehabilitation Systems Subject to Communication Noise
Fault-Tolerant Controllers (2017) of Nonlinear Multi-Agent Systems with Directed Link Failures, Communication Noise and Actuator Faults
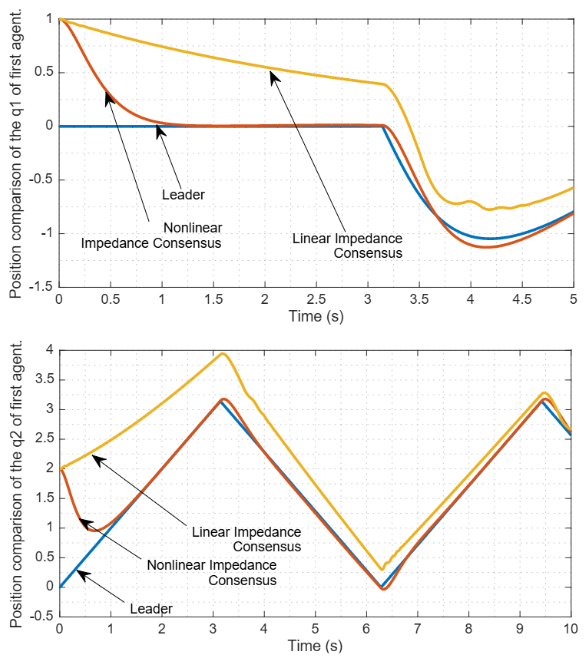
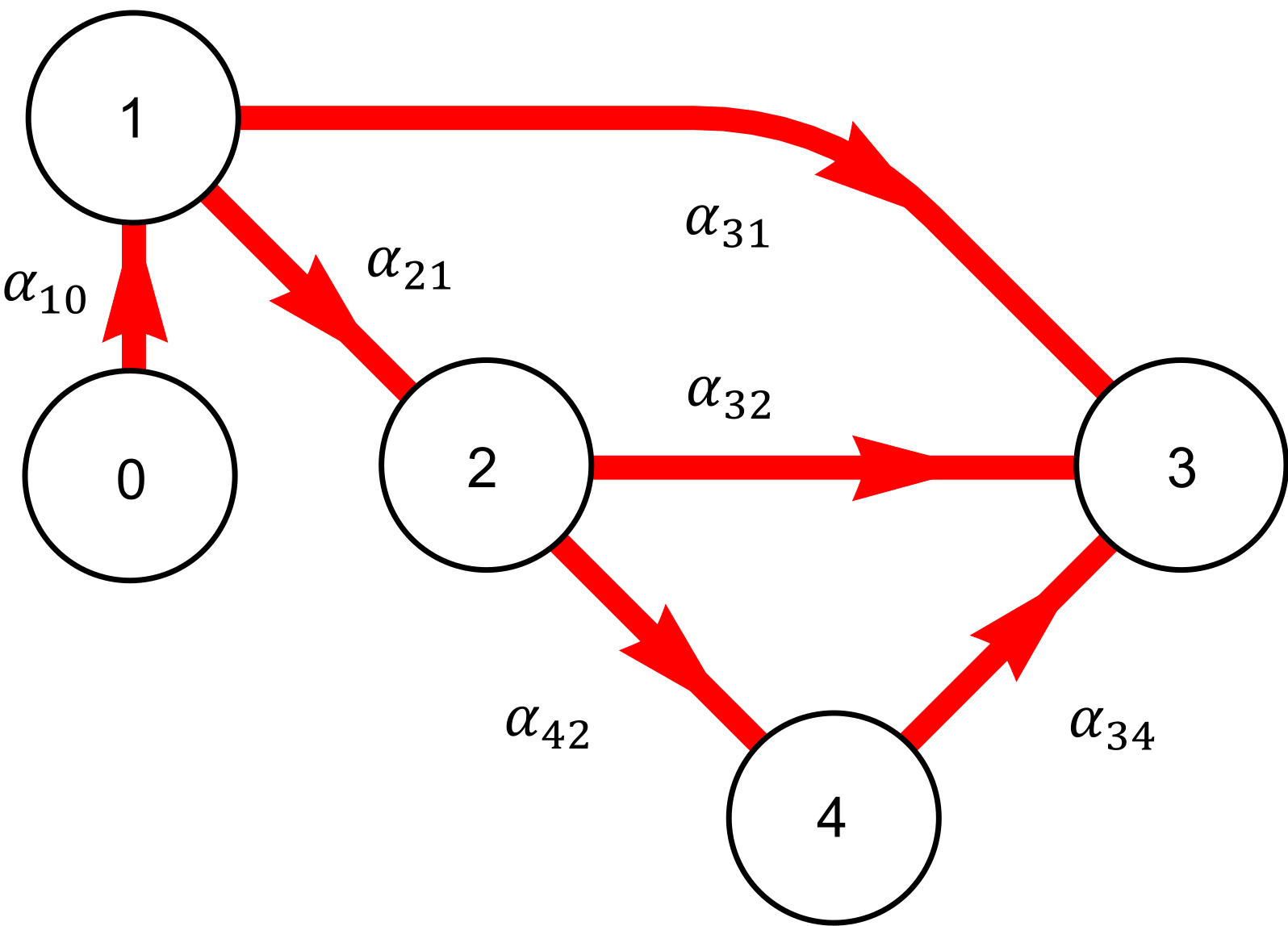
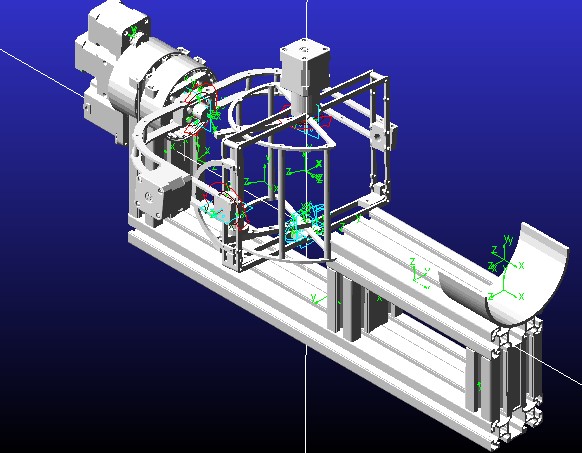
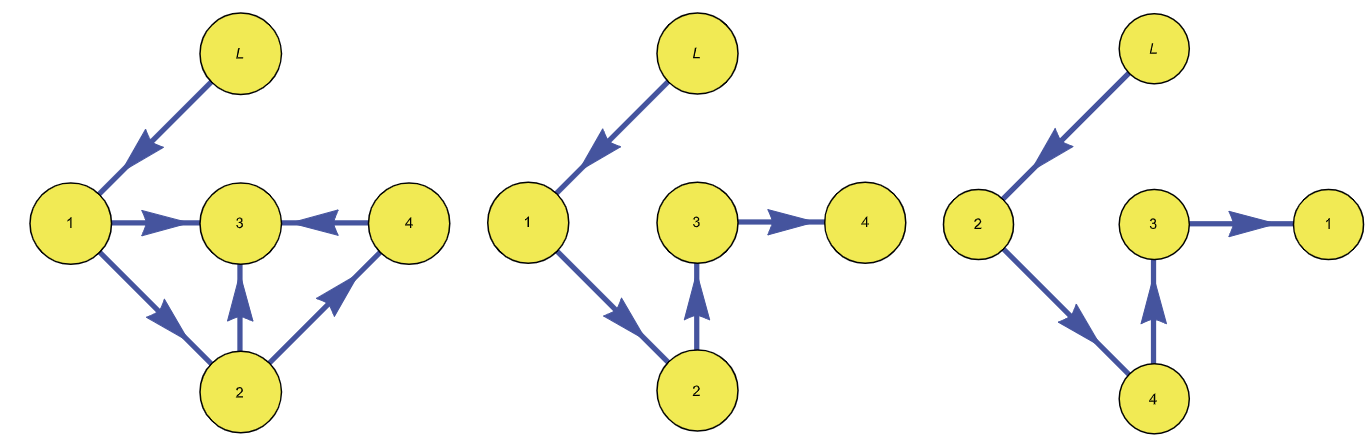
Impedance Consensus Controllers (2016) Nonlinear leader-follower impedance consensus controllers for multi-agent systems. An impedance consensus algorithm for leader-following Lagrangian MASs with directed communication topology, proven stable in the Input-to-State stability (ISS) sense.